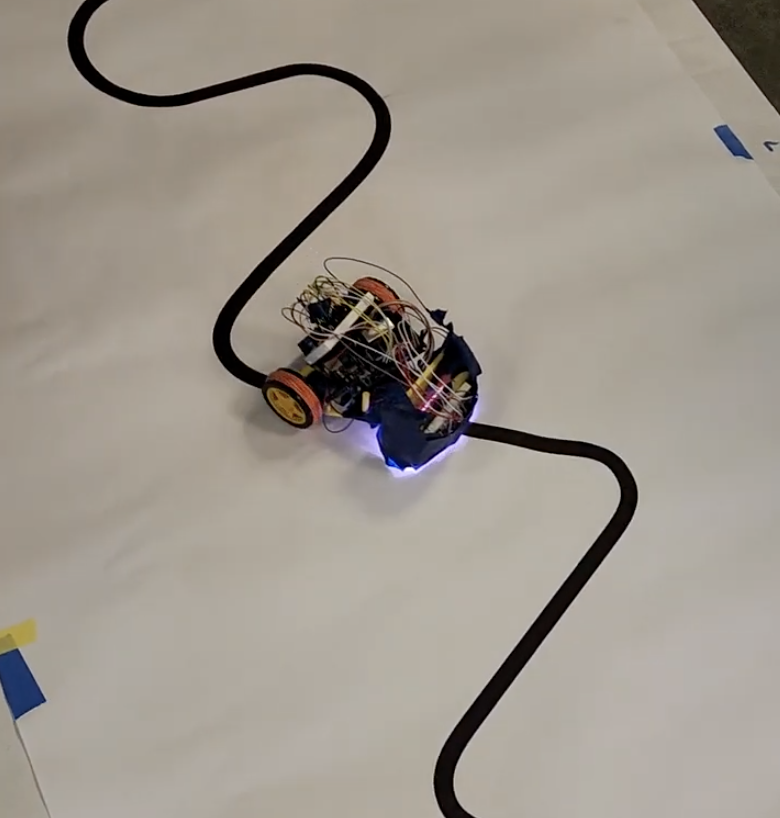
Meet Nexus

Autonomous Sensory Robotical Vehicle
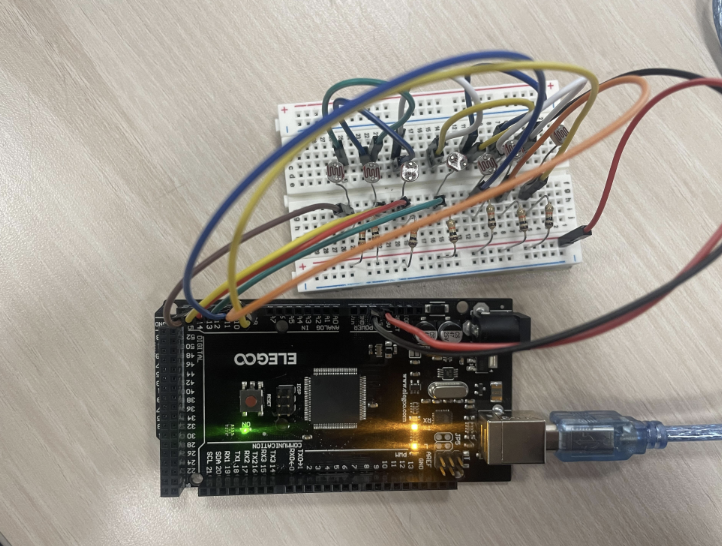
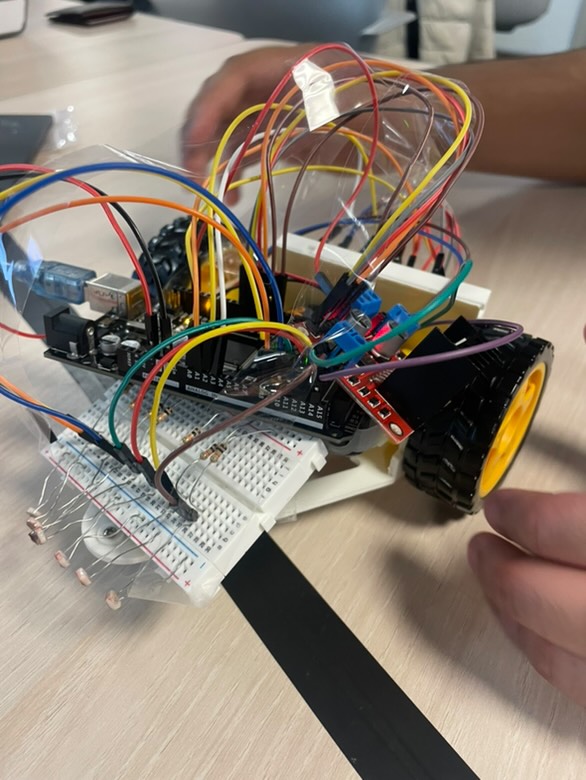
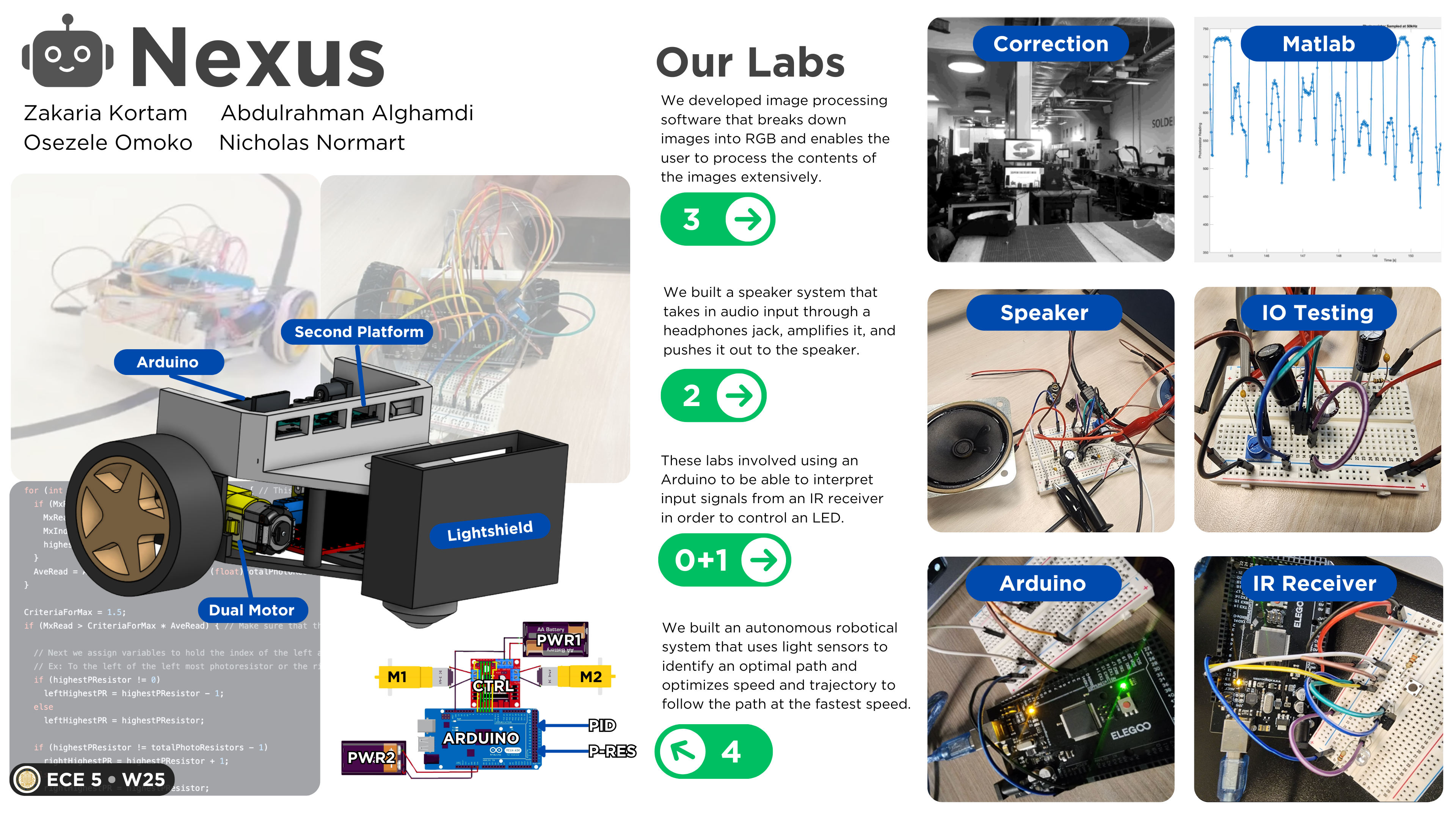
High-precision photoresistors & potentiometers for robust line detection.
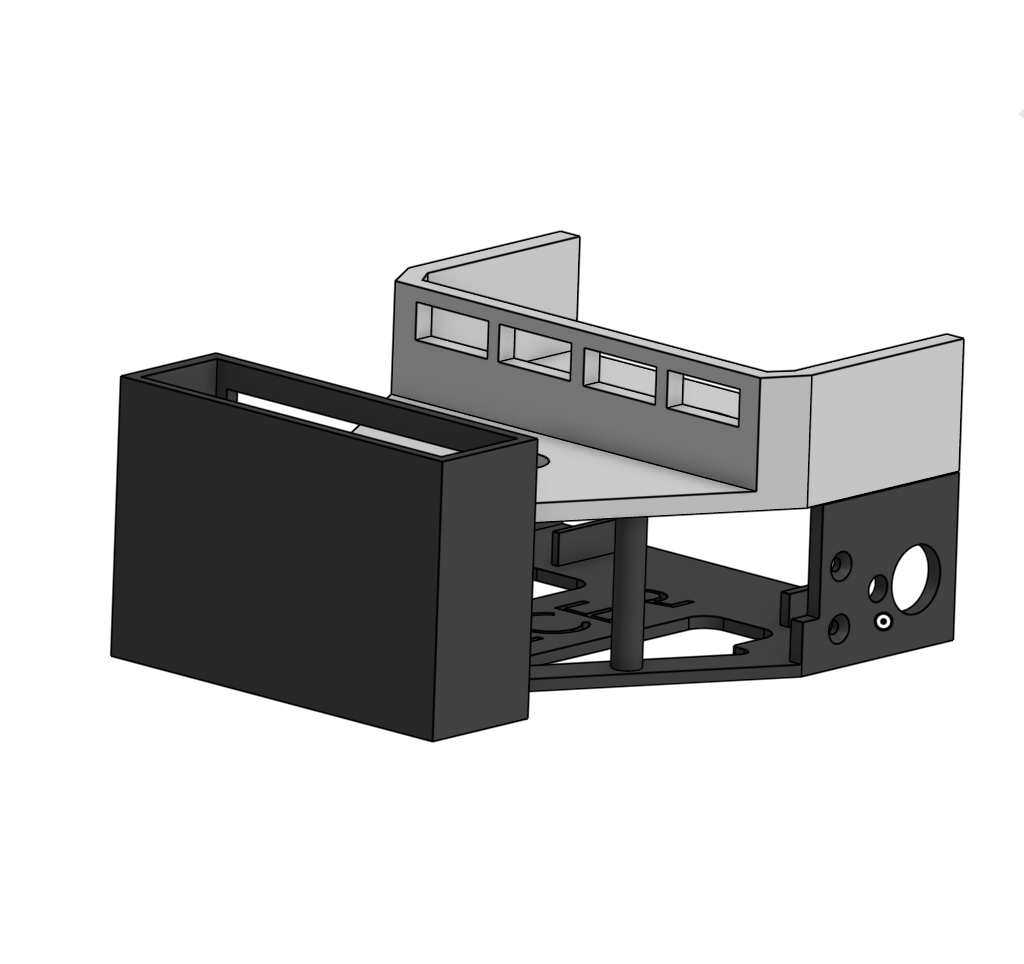
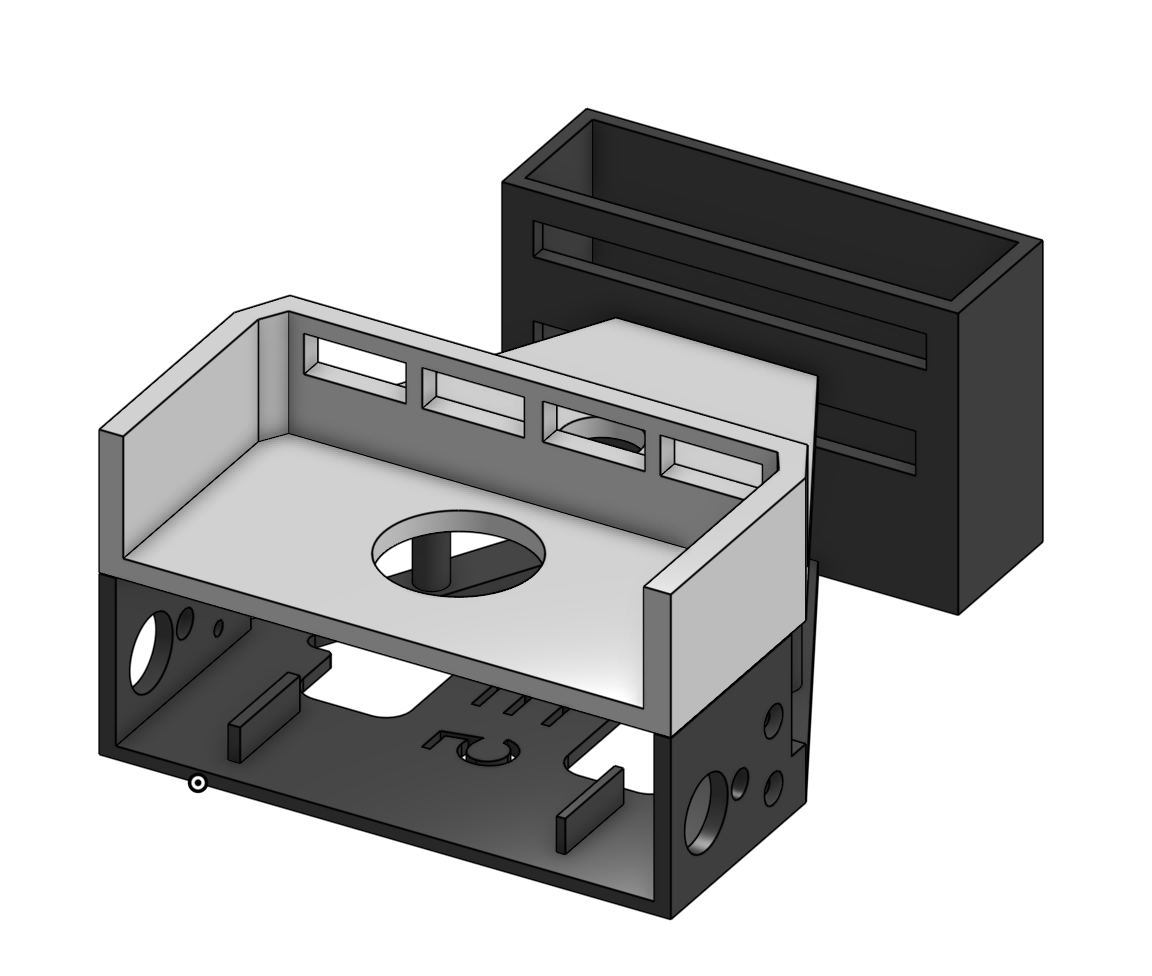
Custom chassis & parts engineered in Onshape and 3D printed.
Multi-layered design integrating sensors, controls, and motors.
Advanced embedded control and real-time PID tuning.
Score: 18, Rank: 2/8
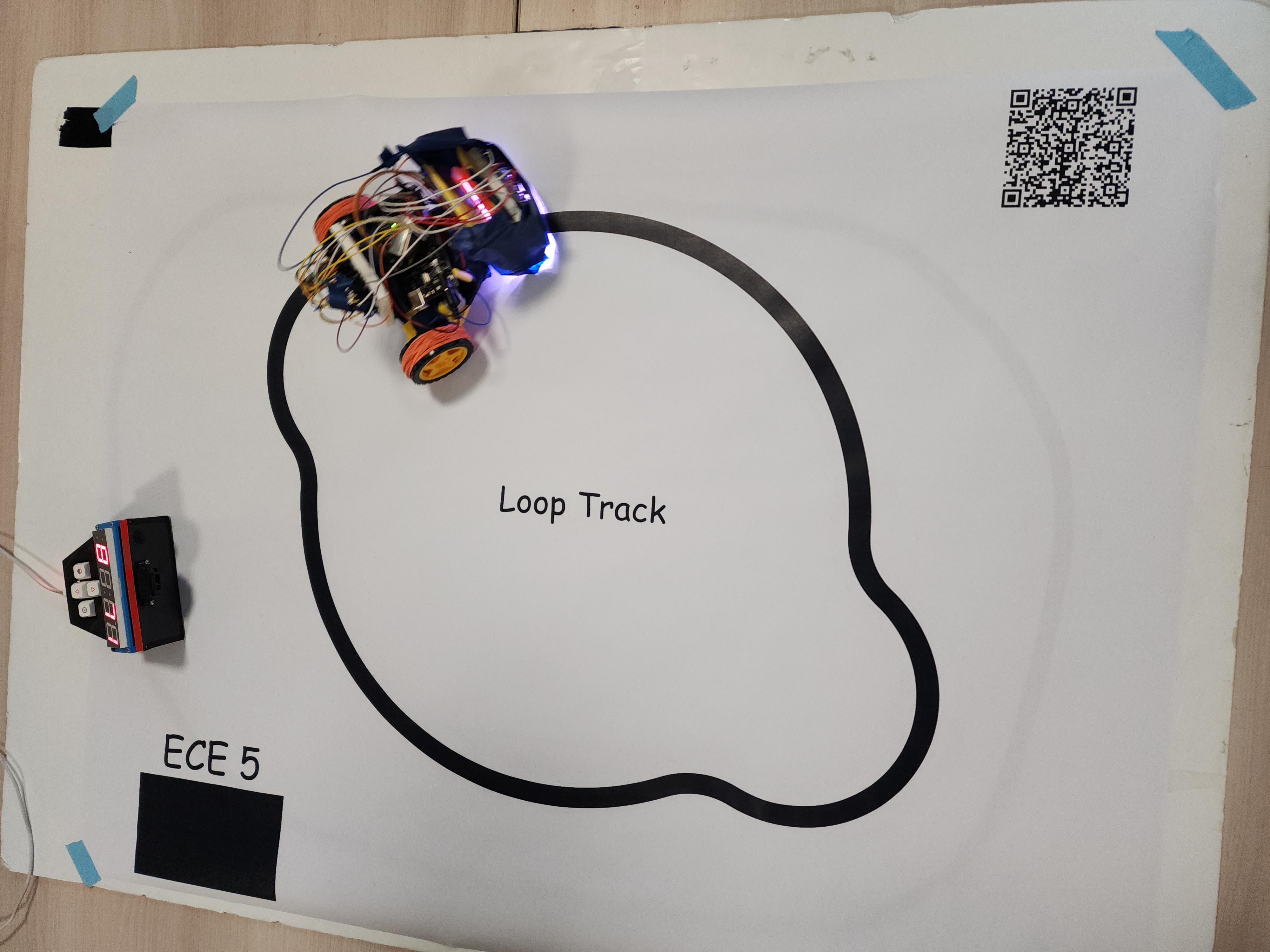
Event 1: Optimized PID for circular ctrack.
Ranked 2nd in this event.
Score: 11, Rank: 2/8
Event 2: Adjusted PID for curved track.
Minor deviation corrected mid-run.
Ranked 2nd overall.
Rank: 4/8
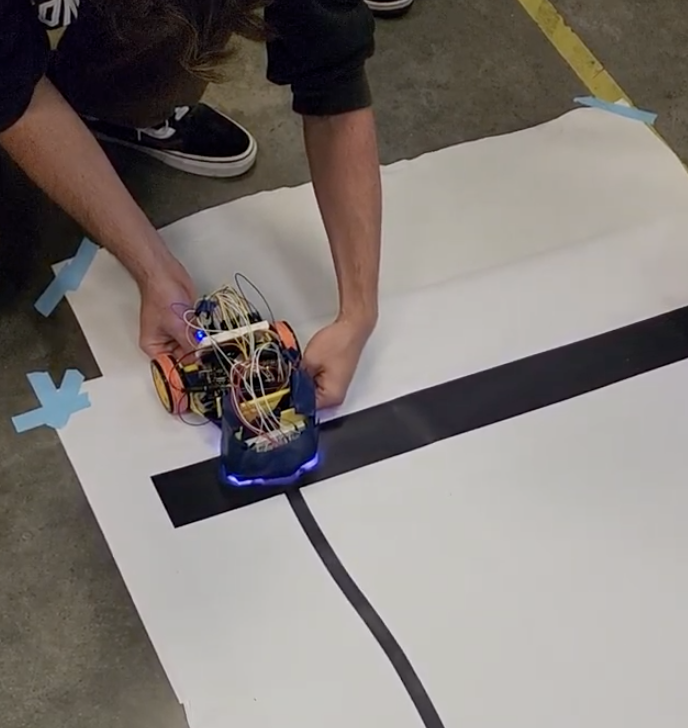
Event 3: Fine-tuned PID for a straight track.
Purely focused on speed.
Performance was lower due to Battery Failure.
Improvements made in the last week: In the final week leading up to the competition, we focused on enhancing Nexus's performance. We optimized the PID control algorithms for better line tracking across varied tracks, improved sensor calibration for more accurate obstacle detection, and reinforced the chassis to withstand rigorous event conditions. These changes resulted in higher scores and better rankings across all three events.

Experience our autonomous robot in a dynamic simulation—detecting objects, mapping terrain, and planning its optimal path in real time.



